Linux驱动开发-编写DS18B20驱动
- 引言
本文详细介绍了如何在linux系统下为ds18b20温度传感器编写驱动程序,以测量环境温度,并将ds18b20注册为字符设备,通过文件接口将温度数据传递给应用层。
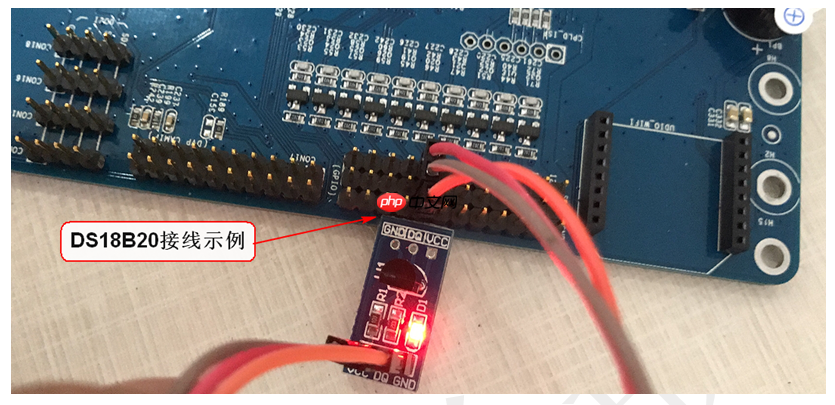
本文使用的开发板是友善之臂的Tiny4412开发板,搭载三星的Exynos-4412 CPU,主频为4核1.5GHz,运行的Linux内核版本为3.5。所使用的温度传感器是DS18B20,这是一款经典的数字温度传感器,广泛应用于高校的毕业设计、实验室和课程设计中。DS18B20的接线非常简单,只需一根数据线和两根电源线,总共三根线,并且它支持硬件序列号寻址,允许在单个IO口上连接多个DS18B20。
- DS18B20简介
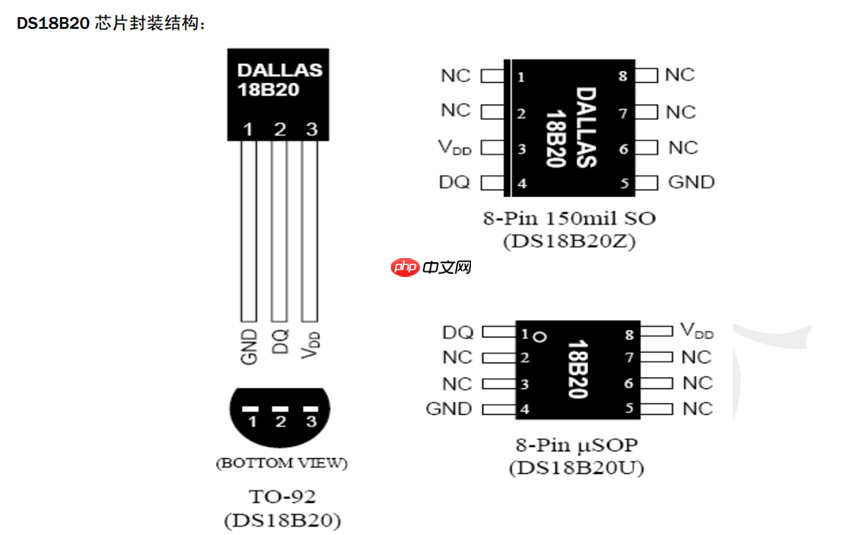
DS18B20的引脚功能如下:
GND 电压地 DQ 单数据总线 VDD 电源电压 NC 空引脚
DS18B20读取温度的步骤如下:
 PHP Apache和MySQL 网页开发初步
PHP Apache和MySQL 网页开发初步
本书全面介绍PHP脚本语言和MySOL数据库这两种目前最流行的开源软件,主要包括PHP和MySQL基本概念、PHP扩展与应用库、日期和时间功能、PHP数据对象扩展、PHP的mysqli扩展、MySQL 5的存储例程、解发器和视图等。本书帮助读者学习PHP编程语言和MySQL数据库服务器的最佳实践,了解如何创建数据库驱动的动态Web应用程序。
 398
查看详情
398
查看详情

发送复位信号-->检测回应信号--->发送0xCC-->发送0x44->发送复位信号—>检测回应信号—>写0xcc--->写0xbe--->循环8次读取温度低字节--->循环8次读取温度高字节---->打印温度信息
DS18B20温度转换示例:
u16 temp;
u8 TL,TH;
u16 intT,decT; //温度值的整数和小数部分
TL=DS18B20_Read_Byte(); //读取温度低8位LSB
TH=DS18B20_Read_Byte(); //读取温度高8位MSB
temp=((u16)TH << 8) | TL;
intT = temp >> 4; //分离出温度值整数部分
decT = temp & 0xF; //分离出温度值小数部分
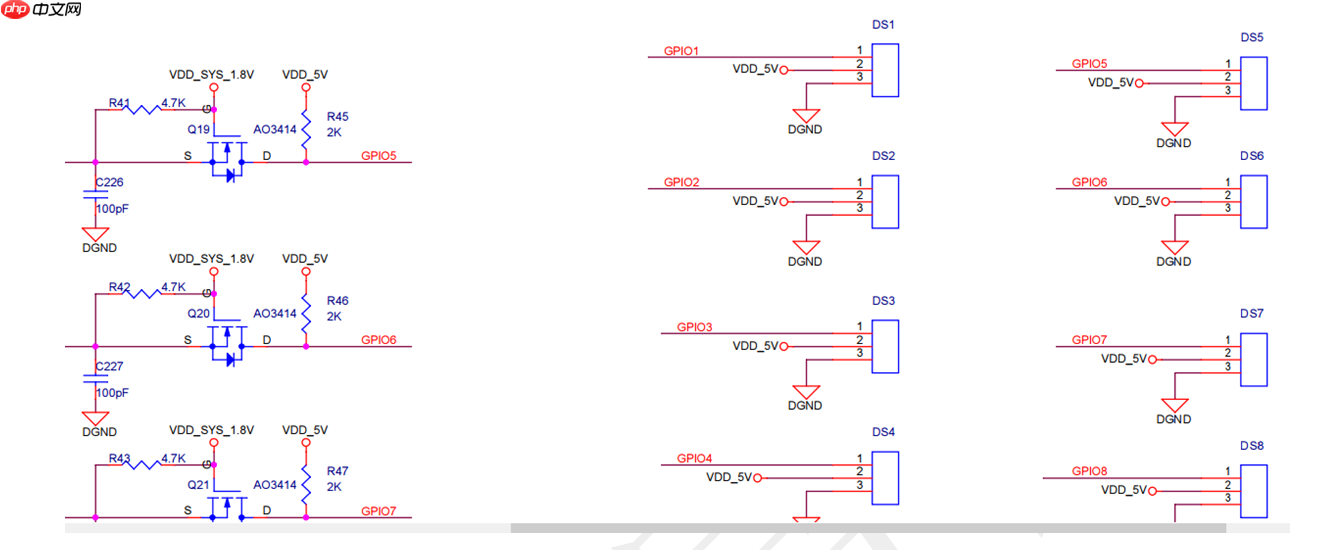
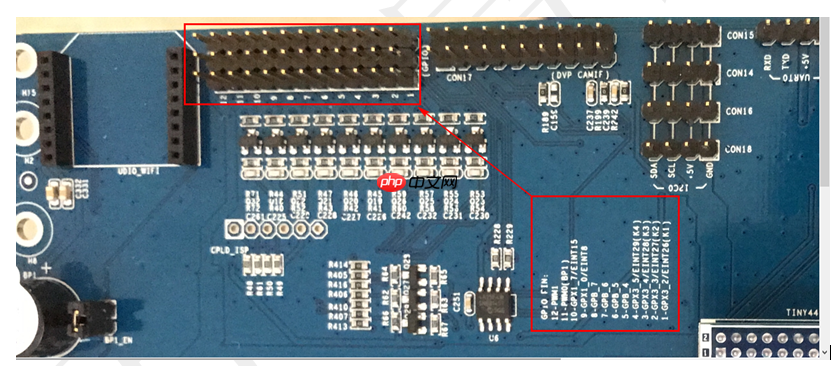
printf("A: %d.%d\r\n",(int)intT,(int)decT); //打印实际温度值- 硬件接线图
Tiny4412开发板扩展GPIO口:
- 示例代码
#include <linux>
#include <linux>
#include <linux> /*杂项字符设备头文件*/
#include <linux> /*文件操作集合*/
#include <linux> /*延时函数*/
#include <linux>
#include <asm>
/*DS18B20 GPIO接口: GPB_4*/
/*定义指针,用于接收虚拟地址*/
volatile unsigned int *DS18B20_GPBCON;
volatile unsigned int *DS18B20_GPBDAT;
#define DS18B20_INPUT() {*DS18B20_GPBCON &= ~(0xf << 8); *DS18B20_GPBCON |= (0x0 << 8);}
#define DS18B20_OUTPUT() {*DS18B20_GPBCON &= ~(0xf << 8); *DS18B20_GPBCON |= (0x1 << 8);}
/*复位DS18B20并检测其存在*/
unsigned char DS18B20_Reset(void)
{
unsigned char retry=0;
DS18B20_OUTPUT();
*DS18B20_GPBDAT &= ~(1 << 4);
udelay(480);
DS18B20_INPUT();
*DS18B20_GPBDAT |= (1 << 4);
udelay(60);
if(!(*DS18B20_GPBDAT & (1 << 4)))
{
retry=0;
while(!(*DS18B20_GPBDAT & (1 << 4)) && retry<240)
{
retry++;
udelay(1);
}
if(retry>=240)
return 1;
else
retry=0;
while((*DS18B20_GPBDAT & (1 << 4)) && retry<240)
{
retry++;
udelay(1);
}
if(retry>=240)
return 1;
}
return 0;
}
/*从DS18B20读取一个位返回值:1/0*/
unsigned char DS18B20_Read_Bit(void) // read one bit
{
unsigned char data;
DS18B20_OUTPUT();
*DS18B20_GPBDAT &= ~(1 << 4);
udelay(1);
DS18B20_INPUT();
*DS18B20_GPBDAT |= (1 << 4);
udelay(14);
if(*DS18B20_GPBDAT & (1 << 4))
data=1;
else
data=0;
udelay(45);
return data;
}
/*从DS18B20读取一个字节*/
unsigned char DS18B20_Read_Byte(void)
{
unsigned char j;
unsigned char dat=0;
for(j=1;j<=8;j++)
{
dat >>= 1;
if(DS18B20_Read_Bit())
dat |= 0x80;
}
return dat;
}
/*写一个字节到DS18B20
dat:要写入的字节*/
void DS18B20_Write_Byte(unsigned char dat)
{
unsigned char j;
unsigned char testb;
DS18B20_OUTPUT();
for(j=1;j<=8;j++)
{
testb=dat & 0x01;
dat >>= 1;
if(testb)
{
*DS18B20_GPBDAT &= ~(1 << 4);
udelay(6);
*DS18B20_GPBDAT |= (1 << 4);
udelay(64);
}
else
{
*DS18B20_GPBDAT &= ~(1 << 4);
udelay(60);
*DS18B20_GPBDAT |= (1 << 4);
udelay(10);
}
}
}
/*tiny4412 DS18B20*/
static int tiny4412_open(struct inode *my_inode, struct file *my_file)
{
/*映射物理地址*/
DS18B20_GPBCON=ioremap(0x11400040,4);
DS18B20_GPBDAT=ioremap(0x11400044,4);
printk("DS18B20初始化成功!\r\n");
/*设置ds18b20为输出模式*/
*DS18B20_GPBCON &= ~(0xf << 8);
*DS18B20_GPBCON |= (0x1 << 8);
return 0;
}
</asm></linux></linux></linux></linux></linux></linux>
<< 4);
udelay(60);
if(!(*DS18B20_GPBDAT & (1 << 4)))
{
retry=0;
while(!(*DS18B20_GPBDAT & (1 << 4)) && retry<240)
{
retry++;
udelay(1);
}
if(retry>=240)
return 1;
else
retry=0;
while((*DS18B20_GPBDAT & (1 << 4)) && retry<240)
{
retry++;
udelay(1);
}
if(retry>=240)
return 1;
}
return 0;
}
/*从DS18B20读取一个位返回值:1/0*/
unsigned char DS18B20_Read_Bit(void) // read one bit
{
unsigned char data;
DS18B20_OUTPUT();
*DS18B20_GPBDAT &= ~(1 << 4);
udelay(1);
DS18B20_INPUT();
*DS18B20_GPBDAT |= (1 << 4);
udelay(14);
if(*DS18B20_GPBDAT & (1 << 4))
data=1;
else
data=0;
udelay(45);
return data;
}
/*从DS18B20读取一个字节*/
unsigned char DS18B20_Read_Byte(void)
{
unsigned char j;
unsigned char dat=0;
for(j=1;j<=8;j++)
{
dat >>= 1;
if(DS18B20_Read_Bit())
dat |= 0x80;
}
return dat;
}
/*写一个字节到DS18B20
dat:要写入的字节*/
void DS18B20_Write_Byte(unsigned char dat)
{
unsigned char j;
unsigned char testb;
DS18B20_OUTPUT();
for(j=1;j<=8;j++)
{
testb=dat & 0x01;
dat >>= 1;
if(testb)
{
*DS18B20_GPBDAT &= ~(1 << 4);
udelay(6);
*DS18B20_GPBDAT |= (1 << 4);
udelay(64);
}
else
{
*DS18B20_GPBDAT &= ~(1 << 4);
udelay(60);
*DS18B20_GPBDAT |= (1 << 4);
udelay(10);
}
}
}
/*tiny4412 DS18B20*/
static int tiny4412_open(struct inode *my_inode, struct file *my_file)
{
/*映射物理地址*/
DS18B20_GPBCON=ioremap(0x11400040,4);
DS18B20_GPBDAT=ioremap(0x11400044,4);
printk("DS18B20初始化成功!\r\n");
/*设置ds18b20为输出模式*/
*DS18B20_GPBCON &= ~(0xf << 8);
*DS18B20_GPBCON |= (0x1 << 8);
return 0;
}
</asm></linux></linux></linux></linux></linux></linux> << 4);
udelay(60);
if(!(*DS18B20_GPBDAT & (1 << 4)))
{
retry=0;
while(!(*DS18B20_GPBDAT & (1 << 4)) && retry<240)
{
retry++;
udelay(1);
}
if(retry>=240)
return 1;
else
retry=0;
while((*DS18B20_GPBDAT & (1 << 4)) && retry<240)
{
retry++;
udelay(1);
}
if(retry>=240)
return 1;
}
return 0;
}
/*从DS18B20读取一个位返回值:1/0*/
unsigned char DS18B20_Read_Bit(void) // read one bit
{
unsigned char data;
DS18B20_OUTPUT();
*DS18B20_GPBDAT &= ~(1 << 4);
udelay(1);
DS18B20_INPUT();
*DS18B20_GPBDAT |= (1 << 4);
udelay(14);
if(*DS18B20_GPBDAT & (1 << 4))
data=1;
else
data=0;
udelay(45);
return data;
}
/*从DS18B20读取一个字节*/
unsigned char DS18B20_Read_Byte(void)
{
unsigned char j;
unsigned char dat=0;
for(j=1;j<=8;j++)
{
dat >>= 1;
if(DS18B20_Read_Bit())
dat |= 0x80;
}
return dat;
}
/*写一个字节到DS18B20
dat:要写入的字节*/
void DS18B20_Write_Byte(unsigned char dat)
{
unsigned char j;
unsigned char testb;
DS18B20_OUTPUT();
for(j=1;j<=8;j++)
{
testb=dat & 0x01;
dat >>= 1;
if(testb)
{
*DS18B20_GPBDAT &= ~(1 << 4);
udelay(6);
*DS18B20_GPBDAT |= (1 << 4);
udelay(64);
}
else
{
*DS18B20_GPBDAT &= ~(1 << 4);
udelay(60);
*DS18B20_GPBDAT |= (1 << 4);
udelay(10);
}
}
}
/*tiny4412 DS18B20*/
static int tiny4412_open(struct inode *my_inode, struct file *my_file)
{
/*映射物理地址*/
DS18B20_GPBCON=ioremap(0x11400040,4);
DS18B20_GPBDAT=ioremap(0x11400044,4);
printk("DS18B20初始化成功!\r\n");
/*设置ds18b20为输出模式*/
*DS18B20_GPBCON &= ~(0xf << 8);
*DS18B20_GPBCON |= (0x1 << 8);
return 0;
}
</asm></linux></linux></linux></linux></linux></linux>
<< 4);
udelay(60);
if(!(*DS18B20_GPBDAT & (1 << 4)))
{
retry=0;
while(!(*DS18B20_GPBDAT & (1 << 4)) && retry<240)
{
retry++;
udelay(1);
}
if(retry>=240)
return 1;
else
retry=0;
while((*DS18B20_GPBDAT & (1 << 4)) && retry<240)
{
retry++;
udelay(1);
}
if(retry>=240)
return 1;
}
return 0;
}
/*从DS18B20读取一个位返回值:1/0*/
unsigned char DS18B20_Read_Bit(void) // read one bit
{
unsigned char data;
DS18B20_OUTPUT();
*DS18B20_GPBDAT &= ~(1 << 4);
udelay(1);
DS18B20_INPUT();
*DS18B20_GPBDAT |= (1 << 4);
udelay(14);
if(*DS18B20_GPBDAT & (1 << 4))
data=1;
else
data=0;
udelay(45);
return data;
}
/*从DS18B20读取一个字节*/
unsigned char DS18B20_Read_Byte(void)
{
unsigned char j;
unsigned char dat=0;
for(j=1;j<=8;j++)
{
dat >>= 1;
if(DS18B20_Read_Bit())
dat |= 0x80;
}
return dat;
}
/*写一个字节到DS18B20
dat:要写入的字节*/
void DS18B20_Write_Byte(unsigned char dat)
{
unsigned char j;
unsigned char testb;
DS18B20_OUTPUT();
for(j=1;j<=8;j++)
{
testb=dat & 0x01;
dat >>= 1;
if(testb)
{
*DS18B20_GPBDAT &= ~(1 << 4);
udelay(6);
*DS18B20_GPBDAT |= (1 << 4);
udelay(64);
}
else
{
*DS18B20_GPBDAT &= ~(1 << 4);
udelay(60);
*DS18B20_GPBDAT |= (1 << 4);
udelay(10);
}
}
}
/*tiny4412 DS18B20*/
static int tiny4412_open(struct inode *my_inode, struct file *my_file)
{
/*映射物理地址*/
DS18B20_GPBCON=ioremap(0x11400040,4);
DS18B20_GPBDAT=ioremap(0x11400044,4);
printk("DS18B20初始化成功!\r\n");
/*设置ds18b20为输出模式*/
*DS18B20_GPBCON &= ~(0xf << 8);
*DS18B20_GPBCON |= (0x1 << 8);
return 0;
}
</asm></linux></linux></linux></linux></linux></linux>以上就是Linux驱动开发-编写DS18B20驱动的详细内容,更多请关注其它相关文章!
热门内容推荐






快捷栏目导航